Neural Continua
A classical neural network is just a function $f$ that takes in an array of inputs, $x_i$, and yields an output array, $y_j$. The input and output usually have different lengths, $N_x$ and $N_y$ (e.g., 784 and 10 respectively for MNIST.) It is formed of the nested discrete operations,
\[y_j = f^{NN}(x_i)=f^D(...f^2(W^2 f^1(W^1x+b^1)+b^2)...+b^D)\]where $D$ is the number of layers, and $f^l$, $W^l$, and $b^l$ are activation functions, weight matrices, and bias vectors for every layer $l$. These layered operations produce a set of intermediate results known as the hidden layers. We can think of the neural network as having intermediate steps,
\[x_i\rightarrow h^1_i \rightarrow h^2_i\rightarrow...h^D_i\rightarrow y_i\]where each hidden layer is the result of the operation $h^{d+1}=f^d(W^dh^d+b^d)$.
I want to make this continuous. How do we describe an arbitrary functional
\[y(\xi) = \mathcal{F}x(\xi)\]where the input is a function with a domain, and the output is also function? I’ll do this by making analogies from the discrete operations in a multilayer perceptron to continuous operations.
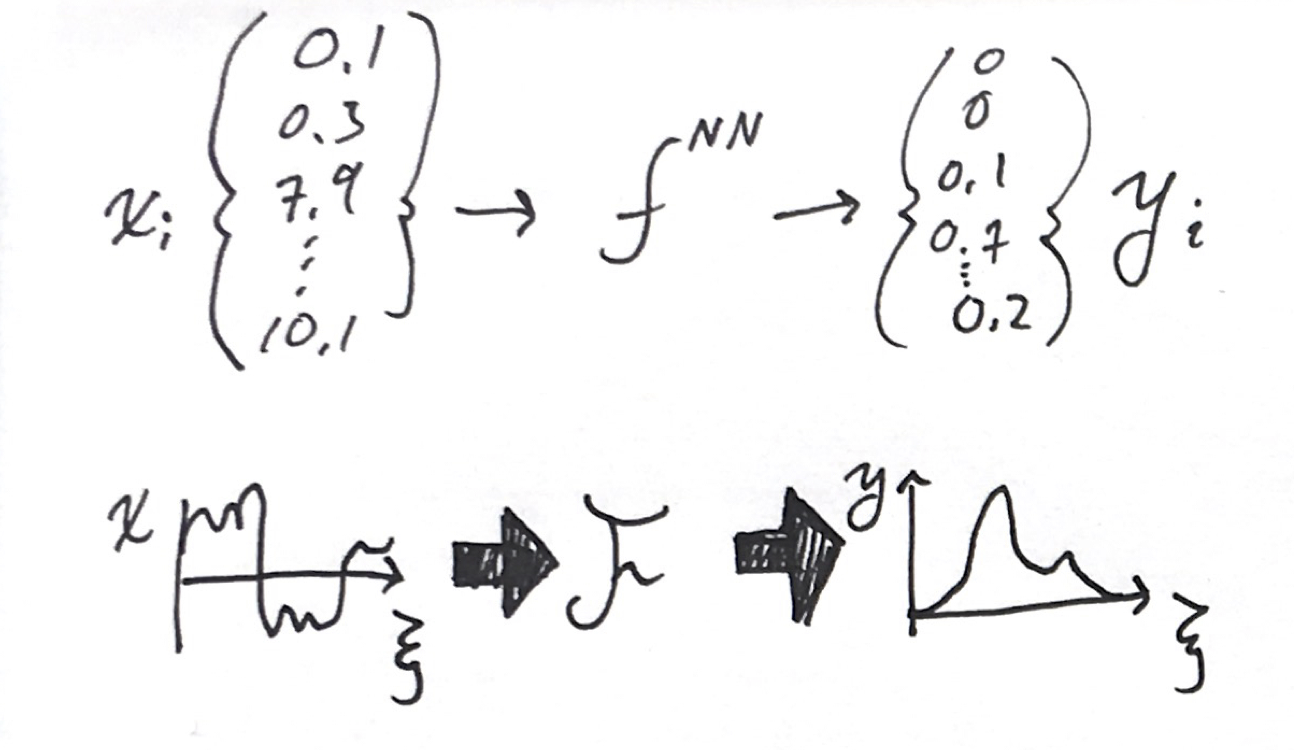
What we will end up with is an integro-differential equation that describes a “neural continuum.” The linear operations along the width of each layer will be replaced by an integral along a signal space, and the nested applications will be replaced by integrating a differential equation in a depth direction.
Why?
Something that bothers me about deep learning today is the lack of convergence behavior. If you throw more parameters at a problem, there is no guarantee that it will do better than the smaller model. Non-convexity and non-uniqueness of problems will certainly make formal convergence proofs a challenge. Maybe we can change the problem slightly to give better behavior.
How do we compare two incrementally different model architectures? If we have one network that was trained, what’s an equivalent network with one more parameter in width or depth? I think this is necessary to show a smooth path.
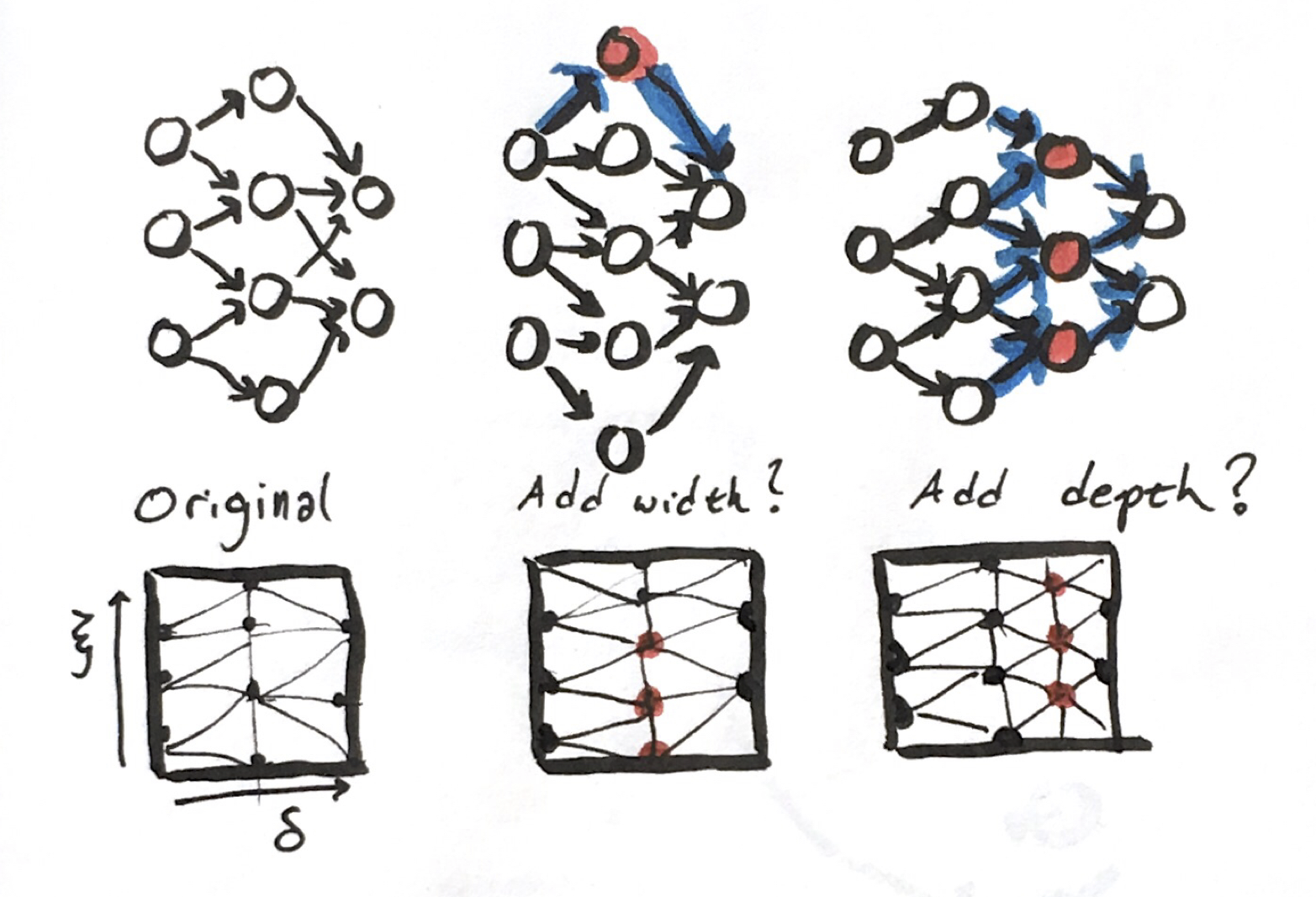 Instead of looking for a specific network, let’s posit that we’re looking for another more abstract object with various representations on our computer. If we can describe a continuous analogue, we can then define a way to slowly increase or decrease the number of parameters describing the network.
Instead of looking for a specific network, let’s posit that we’re looking for another more abstract object with various representations on our computer. If we can describe a continuous analogue, we can then define a way to slowly increase or decrease the number of parameters describing the network.
Arrays to Signals
The basic element of a neural network calculation is the array of activations. Let $N_w$ denote the width of this layer $d$. At each layer, there is an $N_w$ array of hidden values
\[\mathbf{h}^d=\{h_1,h_2,...h_N\}\]In convolutional networks, sometimes these arrays are 2D, 3D, or higher carrying some sort of spatio-temporal-channel meaning. Then, $\mathbf{h}$ has multiple indices in a grid layout, which can be indexed as $h^d_{ijkc}$ for a four dimensional example with $N_x\times N_y \times N_z \times N_c$ dimension.
Consider now a one dimensional function that maps from some nominal domain onto the reals
\[h(\xi) : [-1,1]\rightarrow\mathbb{R}\]we can have higher dimensional input fields with higher dimensional outputs, e.g.,
\[h(\xi,\eta,\omega):[-1,1]\times[-1,1]\times[-1,1]\rightarrow \mathbb{R}^c\]for a three dimensional field with $c$ channels at each point. (The domain $[-1,1]$ was an arbitrary choice, but if we picked any other domain, we’d probably end up mapping back to $[-1,1]$ for other steps later. E.g., common basis sets and Gaussian integration weights are defined on this domain.)
Let us now choose to interpret our array of hidden activations as coefficients to a
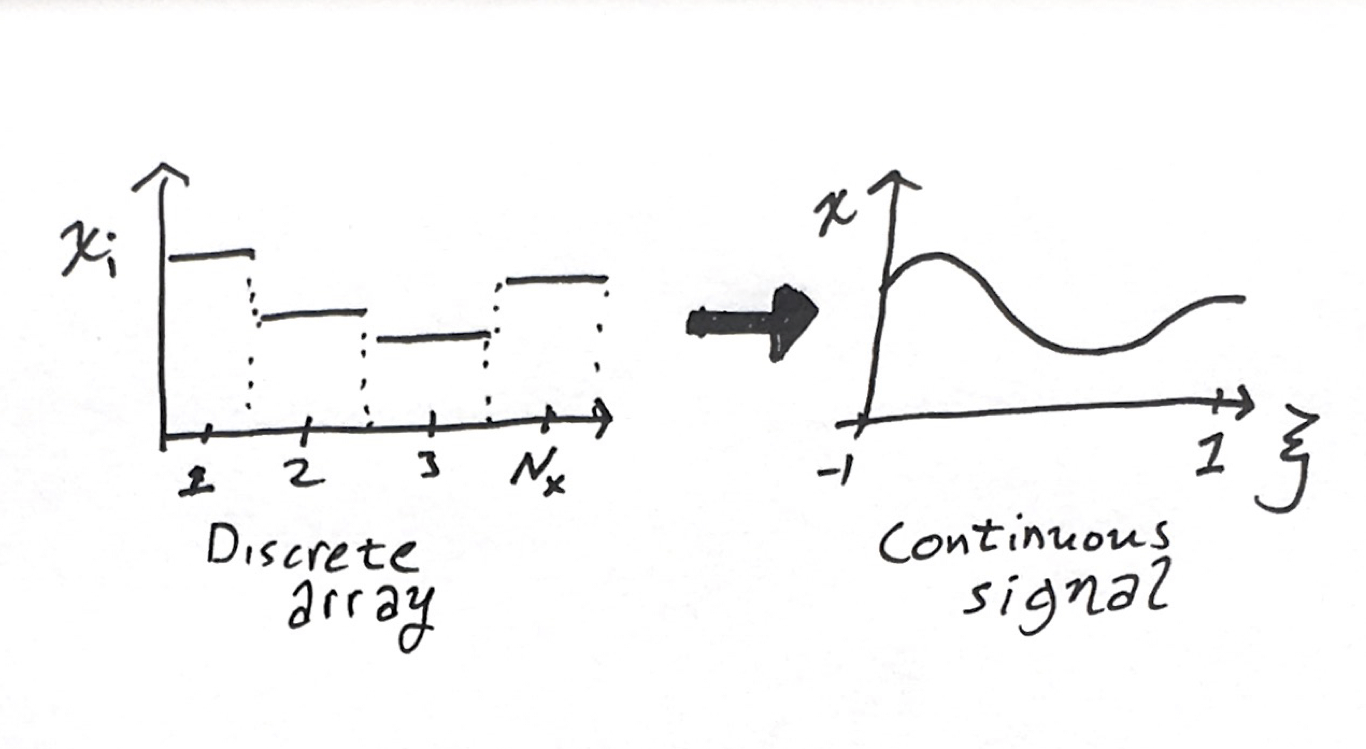
These numbers don’t necessarily have any order applied in their meaning. For example, in NLP applications the indices refer to entries in the lexicon, whose order is arbitrary. But, for a lot of applications there is a spatiotemporal interpretation with images or audio signals, for example. I don’t think this line of reasoning is restricted to such applications.
Linear Operations to Continuous Convolutions
The linear step of the perceptron is:
\[\mathbf{y}=\mathbf{W}\mathbf{x}+\mathbf{b}\]The operation is expressed in summation notation explicitly by
\[y_i = \sum_{j=1}^{N_w} W_{ij} x_j + b_i\]A 2D array is just one possible representation of a linear operator. As we did above, we can represent the weight matrix as a 2D function,
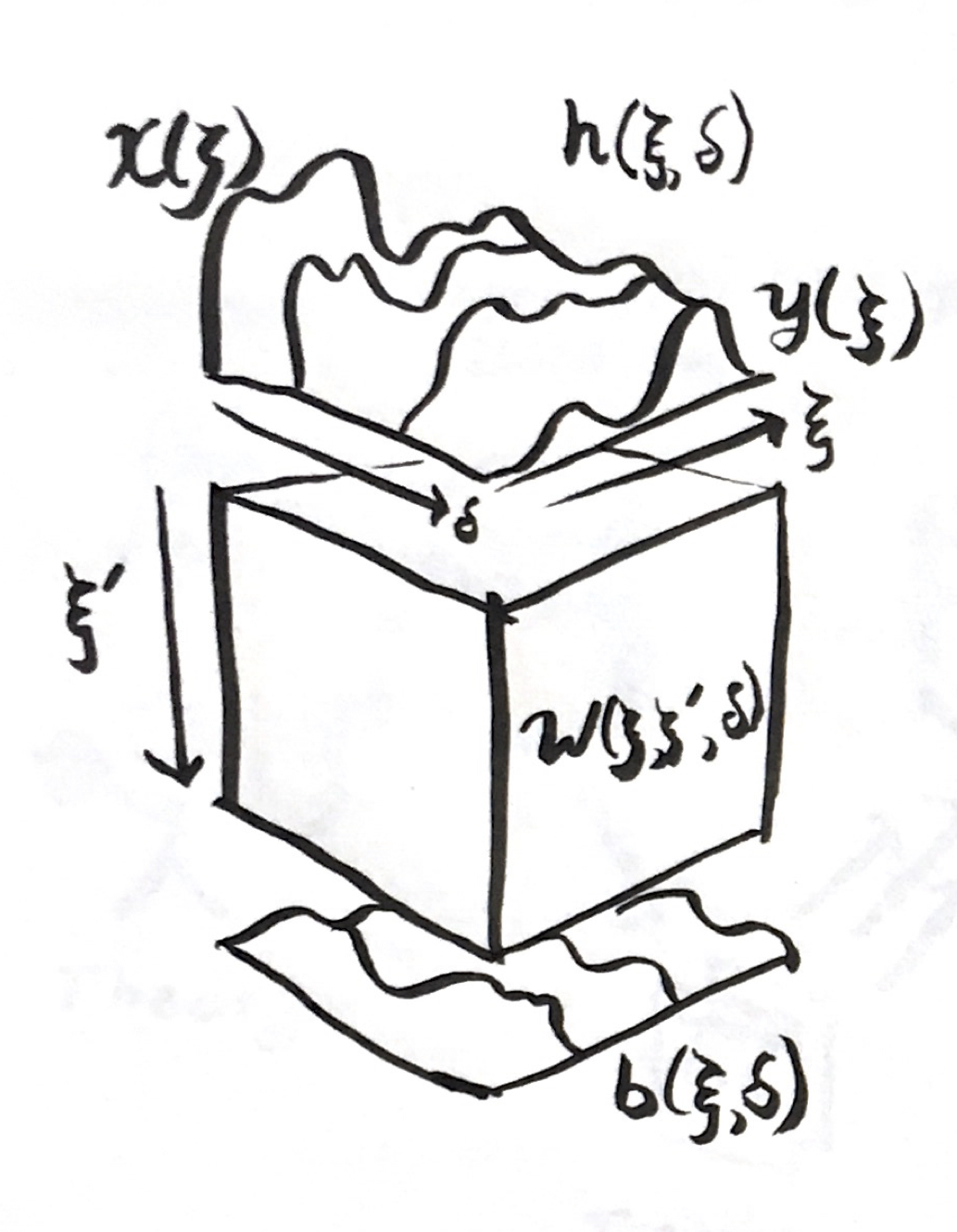
\[W(\xi,\eta) = [-1,1]\times[-1,1] \rightarrow \mathbb{R}\]The limit of summation is integration. In conjunction with adding a 1D bias function, the analogy of the linear transform is the following integral:
\[y(\xi)=\int_{-1}^1W^d(\xi,\eta)x(\eta)\mathrm{d}\eta+b^d(\xi)\]We can illustrate the analogy as so:
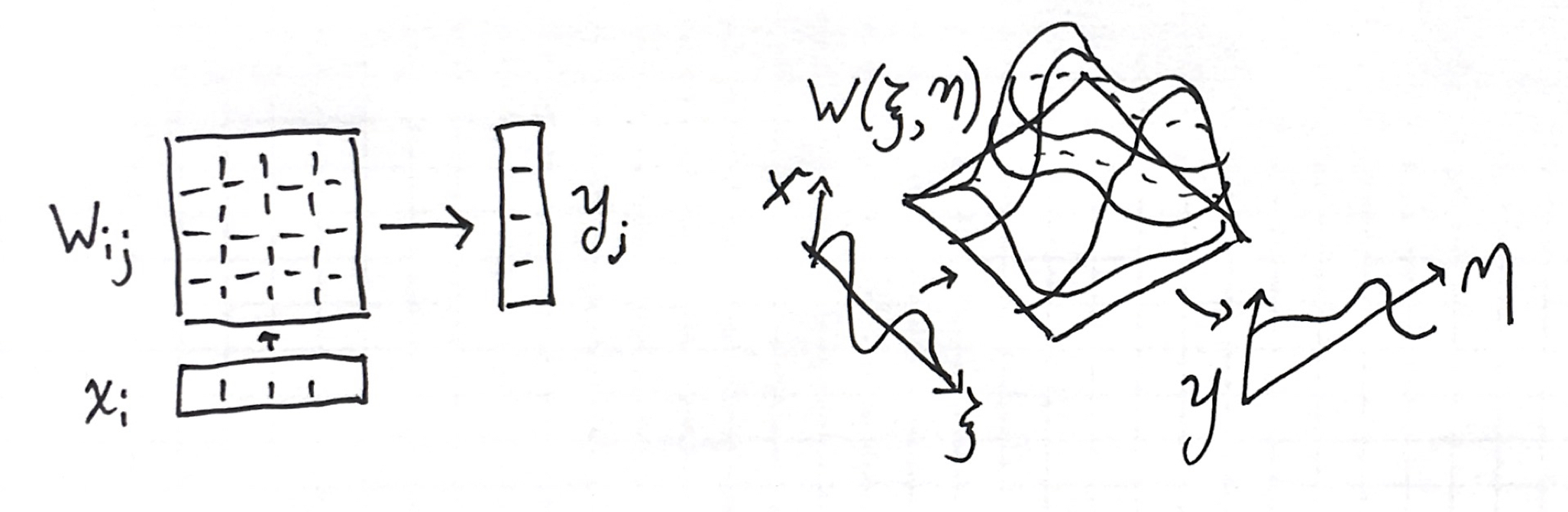 In the continuous analogue, every weight matrix is replaced by a 2D function that convolves in the input function into an output function. This is also a linear operator. We chose both domains to be the same for the next step.
In the continuous analogue, every weight matrix is replaced by a 2D function that convolves in the input function into an output function. This is also a linear operator. We chose both domains to be the same for the next step.
Composition to Integration
The secret to neural networks is the composition of functions,
\[y = (f^{N_d} \circ f^{N_d-1}... \circ f^2...f^1)(x),\](where we’ve tucked the $W+b$ operations into $f$ for this section.)
Let’s define the analogy to a summation operator for composition,
\[\mathop{\Large\bigcirc}_{d=1}^{N}f^{d}=f^{N}\circ f^{N-1}...\circ f^{2}\circ f^{1}\]where $\bigcirc$ means repeated composition over a list of unknowns. (In Flux.jl, the Chain function implements $\bigcirc$.) We can then write our definition of a basic multilayer perceptron as
where I wrote an anonymous function for the linear operator.
Just like we did with summation, I want to turn composition into a continuous operation. For that, we need to define a gradual function application.
The input and output from each of these discrete steps forms a list of functions,
\[x(\xi),\, h^1(\xi),\,h^2(\xi),\,...h^{N_d}(\xi),\,y(\xi)\]For the individual signal slices, we turned an array with indices $i\in[1…N_d]$ into a function $\xi^l\in[-1,1]$. Let us decide that the domains and ranges for every function in this list are the same. Let’s now make a new transformation from this list of functions indexed by $d\in[1…N^d]$ to a new depth signal direction $\delta\in[0,1]$. Now we have a 2D function
\[h(\xi,\delta):\underbrace{[-1,1]}_{\text{width}}\times\underbrace{[0,1]}_{\text{depth}}\rightarrow\mathbb{R}\]where we defined $h(\xi,0)=x(\xi)$ and $h(\xi,1)=y(\xi)$. Suppose the original layers of the discrete network be spaced out by a uniform $\Delta=1/(N_d+1)$ in this depth direction in our continuous analogue. In the discrete form of the network, the way we get from one layer indexed by $i$ to next indexed by $i+1$ is
\[h(\delta=\Delta \times (i+1))=f^i(h(\delta=\Delta\times i))\]Between two layers, starting at $\delta=\Delta i$, the difference in $h$ is equal to an integral between two points,
\[h(\delta+\Delta)=h(\delta)+\int_\delta^{\delta+\Delta} \frac{\mathrm{d}h}{\mathrm{d}\delta} \mathrm{d} \delta' = f(h(\delta))\]where $t$ is a dummy variable of integration. Doing some rewriting,
\[\int_\delta^{\delta+\Delta} \frac{\mathrm{d}h}{\mathrm{d}\delta} \mathrm{d} \delta' = f(h(\delta))-h(\delta)\]In the original discrete network, each layer is a discrete operation forwards. That begs us to use a Forward Euler approximation to this integral,
\[\Delta \left. \frac{\mathrm{d}h}{\mathrm{d}\delta} \right|_\delta = f(h(\delta))-h(\delta)\]or,
\[\frac{\mathrm{d}h}{\mathrm{d}\delta} = \frac{f(h(\delta))-h(\delta)}{\Delta}\]which gives us a differential equation for $h$ along the depth direction $\delta$.We can solve it with any integrator, not just Forward Euler. Forward Euler is just how we make the analogy to the feed forward discrete network. $\Delta$ is a constant that is smaller than the total length of the domain in $\Delta$ and scales the rate of the discrete activation functions $f$.
It is not necessary to use the original activation function $f$. We can define an activation rate $\gamma$ which corresponds to a particular discrete function with the above equation, or select any arbitrary function. I initially hypothesized a function with a continuous derivative (softplus vs. rectifier) would be best; I do not think that is the case anymore but have not tested this.
The Neural Continua Integro-Differential Equation
Piecing together the above continuous analogues from the individual operations in a discrete neural network, we derive the following integrodifferential equation
\[\frac{\partial}{\partial \delta} h(\xi,\delta)= \gamma\left(\int_{-1}^1 W(\xi,\xi',\delta)h(\xi',\delta)\mathrm{d}\xi'+b(\xi,\delta) \right)\]where $\gamma(x)=(f(x)-x)/\Delta$, subject to the initial condition
\[h(\xi,0)=x(0).\]After solving this equation, the output of the network is:
\[y(\xi)=h(\xi,1)\]The network $\mathcal{F}$ is defined by the selection of nonlinearity $\gamma$, 3D weight field $W(\xi,\eta,\delta)$, and 2D bias field $b(\xi,\delta$). There is no discrete choice of layer widths or network depth.
Discretization
We need to perform two discretizations to be able to solve this system: 1) signal-depth-space discretization of the fields, and 2) discretization of the integration across $\delta$ to evolve as a discrete loop.
The first of these harkens back to the beginning of this discussion. We need to represent a continuous function as a set of numbers in memory on our computer. We can choose to represent functions as linear combinations of functions from discrete spaces, where we need 3D functions for $W$ to produce a discrete $\hat{W}$,
\[\hat{W}(\xi,\eta,\delta)=\sum_i w_i \phi_i(\xi,\eta,\delta)\]and 3D functions for $b$ to produce a discrete $\hat{b}$,
\[\hat{b}(\xi,\delta)=\sum_i b_i\psi(\beta,\delta)\]We can recover the original specification by having 3-way piecewise constant discretizations in $\xi,\eta$, and $\delta$. We could slice in $\delta$ first, to define our layers, then pick different piecewise supports for each of these $\delta$s to have weight matrices with different dimensions. (The original discrete neural networks are just nonlinear versions of this—but let’s not make this manuscript recursive!)
My intuition suggests using spectral shape functions along $\xi$ and $\xi’$, and using compact shape functions along $\delta$. I suspect orthogonality along $\xi$ might be problematic.
The integration along the depth can be handled by any ordinary differential equation integrator. We used Forward Euler to make the correspondence, but we could use higher order or implicit solvers. It will make a distinction when doing the backwards propagation of the output of the network. The full domain support of the integral convolution ($\int W h \mathrm{d}\xi’$) could make the integration in depth-time tricky to do efficiently.
Training
We can define a loss function between the label signal and solution of the network by integrating over the signal,
\[L(y,y^*)=\int_{-1}^{1} \left(y(\xi)-y^*(\xi)\right)^2\mathrm{d}\xi\]The optimization problem involves searching for functions $W(\xi,\eta,\delta)$ and $b(\xi,\delta)$ that minimize the integral loss,
\[\min_{W,b} \sum_{i=1}^{N_{train}} L(y^i,\mathcal{F}x^i)\]After discretization, the approximate optimization problem is:
\[\min_{\hat{W_i},\hat{b_i}} \sum_{i=1}^{N_{train}} L(y^i,\hat{\mathcal{F}}x^i)\]This may seem more complicated, but inverting on the coefficients to fields in partial differential equations is a well studied field. This problem looks a lot like the full waveform inversion problem in geological prospecting, wherein we’re solving for material properties such as elastic bulk modulus $K(x,y,z)$ and density $\rho(x,y,z)$ subject to acoustic datasets paired with sources, $hammer(t)$ and $f(x_{microphone},t)$.
Multiple Representations of the Same Model
Note that now we have posited a true problem, and an approximate problem. We can now argue that each time we choose a new discretization (cf. network architecture), we are looking for a better (or worse) facsimile on our computer, not a completely new entity.
The discrete gives us a way to transform between one “width-depth” discretization to another by projecting between the four meshes ($\hat{W},\hat{b}\rightarrow \hat{W}’,\hat{b}’$). Suppose we had trained one network $\mathcal{F}$, and decide we want more discretization in the depth or width. We can create a new mesh that’s finer, and then project to the new unknowns,
\[\min_{w'_i} \int_{0}^1\int_{-1}^1\int_{-1}^1 \left( \sum_{i=1}^N\left( w_i\phi_i\right)-\sum_{i=1}^{N'}\left( w'_i\phi'_i\right) \right)^2\mathrm{d}\xi'\mathrm{d}\eta\mathrm{d}\delta\]This yields a linear projection operation which is common in finite element and spectral methods.
The ultimate goal is to obtain a procedure where we can:
- Optimize a continuum on an initial discretization,
- Refine until reaching the desired amount of accuracy,
- Project down a more efficient representation for inference efficiency.
I hypothesize that this would give us more confidence in our models, and a faster training procedure by exploiting multigrid methods.
What to do with this?
I never implemented this idea because it seemed like a lot of effort. I originally had the variational calculus interpretation of models as a function we’re trying to approximate. That perspective makes us look for better abstract representations of functions and function spaces to figure out more clever ways to Lately, I’ve been leaning towards the discrete program interpretations of models, wherein we’re directly synthesizing and learning computer programs with floating point variables and a listing of instructions fmuls, fadds, gotos, etc. A few new developments made me flip back to these pages in my notebook and start thinking about mathematically solving for continuous functions again.
The Neural Ordinary Differential Equation at NeurIPS uses this kind of idea in the depth. The Julia implementation using Flux.jl shows that it could possibly be implemented very easily. The work of Chang et. al used a similar ODE interpretation of residual networks, and pushed it further to develop a multigrid-in-time technique for accelerated training. (I really like this; it uses the concept of smooth refinement of an approximation, and the multigrid method is great algorithm.) They present a similar equation to $\mathrm{d}h/\mathrm{d}\delta=(f(h)-h)/\Delta$ specific for residual networks where $f=G(h)+h$. The formulation I developed here includes a simultaneous continuum-ization of the width of the network that can applied to more than residual networks.
Learning more about full waveform inversion (I credit talking to Russell J. Hewett and following his course for PySit) made me realize that the optimizing for fields like $W$ or $b$ is well studied and not completely intractable.
Today (when I wrote up most of this) I attended a talk on group equivarent convolutional networks by Taco Cohen which was deriving the discrete model using differential geometry from the perspective of continuous functions obeying symmetries. This approach is actually phrasing the hidden layers as continuous fields and designing layers that obey properties on the fields, before discretizing the operators.
Hopefully this presentation helps interpret new developments in continuous models. I would want to find a problem with 1D functions as inputs to actually implement this exact idea—perhaps audio signals.
Reference
-
Chen, Tian Qi, Yulia Rubanova, Jesse Bettencourt, and David K. Duvenaud. “Neural Ordinary Differential Equations.” CoRR abs/1806.07366 (2018). http://arxiv.org/abs/1806.07366
- Chang, Bo, Lili Meng, Eldad Haber, Frederick Tung, and David Begert. “Multi-Level Residual Networks from Dynamical Systems View.” ArXiv Preprint ArXiv:1710.10348, 2017.
- Cohen, Taco S., Maurice Weiler, Berkay Kicanaoglu, and Max Welling. “Gauge Equivariant Convolutional Networks and the Icosahedral CNN.” CoRR abs/1902.04615 (2019). http://arxiv.org/abs/1902.04615.